SURAGUS 解决方案:现场涡流感应
涡流测量原理
在导电材料附近施加高频交变磁场时,导体内会产生涡流。 这些电流会产生与原始磁场相反的磁场,从而导致传感器阻抗发生可测量的变化。 对于导电薄膜而言,涡流响应的大小直接取决于薄膜的片电阻,而片电阻与厚度的关系为 Rs = ρ / t 在哪里?- Rs= 板材电阻(欧姆/平方)
- ρ= 材料电阻率(欧姆表)
- t= 薄膜厚度(米)
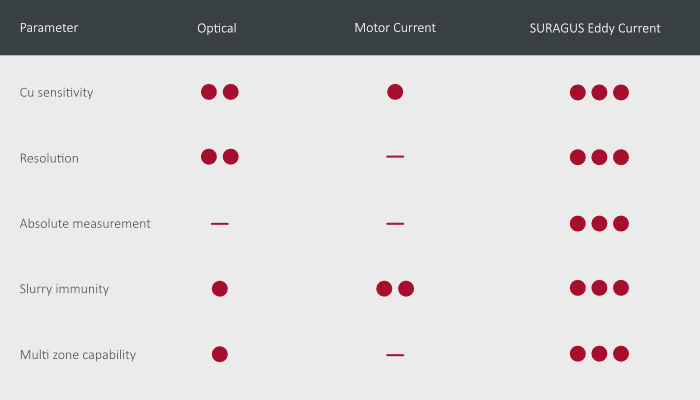
CMP 应用的优势
| 优势 | 对《议定书》缔约方会议的益处 |
|---|---|
| 非接触式 | 无磨损,不会污染晶片 |
| 对泥浆不敏感 | 对不透明浆料可靠 |
| 直接测量厚度 | 绝对值,而不仅仅是趋势 |
| 对金属的高灵敏度 | 对铜、钨、钴和阻挡金属具有极佳的灵敏度 |
| 快速响应 | 以工艺速度进行实时监控 |
| 结构坚固 | 可抵御潮湿和磨损环境 |
SURAGUS 传感器技术
SURAGUS 已开发出专门的涡流传感器,并针对 CMP 集成进行了优化: EddyCus® 在线传感器- 压盘集成的紧凑外形
- 密封结构,适用于潮湿环境
- 根据目标薄膜厚度范围优化工作频率
- 高速测量能力(每秒超过 50 个读数)
| 参数 | 参数 |
|---|---|
| 厚度范围 | 50 纳米至 10 微米(取决于材料) |
| 分辨率 | 小于 1 纳米(优化条件下) |
| 测量速率 | 最高 50 赫兹 |
| 提升公差 | 最大 5 毫米 |
| 工作环境 | 潮湿,10 至 40°C |
| 输出接口 | 模拟(0 至 10 V)或数字(RS485、以太网) |
测量性能
灵敏度
经过优化的线圈几何形状和电子元件可在典型的 CMP 提升距离(1.5 至 3 毫米)上实现每纳米大于 2 mV 的测量灵敏度,从而实现纳米级分辨率。
重复性
系统重复性优于正负 0.5%,可在抛光过程中可靠地检测微小的厚度变化。
速度
测量速率高达 50 Hz,每旋转一次晶片可提供多个数据点,从而实现实时过程监测和控制。
与其他方法的比较
集成架构
压盘集成配置
最常见的集成方法是将传感器安装在抛光压盘中,通过抛光垫上的窗口进行测量。
┌─────────────────────────────────────────────────────────────┐ 压盘集成 │ │ │ 载物台头(旋转) │ │ ┌─────────────┐ │ │ │ 晶圆 │ ←── 晶圆朝下 │ │ │ │ │ │ │ │ │ │ │ │ │ │ │ │ │ └─────────────┘ │ │ ═══════════╤═════════════════════════ ← 抛光垫 │ │ 窗口 │ │ ┌──────────┴──────────────────────────┐ │ │ │ 压盘 │ │ │ │ ┌──────────────┐ │ │ │ │ │ suragus │ │ │ │ │ │ │ 涡流│ ←── 传感器在压板上 │ │ │ │ │ 传感器 │ │ │ │ │ └──────┬───────┘ │ │ │ └────────────┼────────────────────────┘ │ │ │ │ │ ▼ │ │ 信号处理 │ │ 和数据输出 │ └─────────────────────────────────────────────────────────────┘
测量几何
在压盘旋转时,传感器每转一圈从晶圆下方经过一次。
晶圆和压盘的相对旋转会导致传感器在晶圆表面划过一条复杂的路径,在连续经过时对不同的径向位置进行采样。
优势
- 测量正在抛光的实际晶片
- 每次轮换采样多个区域
- 对承载头的改动最小
- 传感器保护在衬垫表面以下
多传感器配置
为了提高空间分辨率和加快反馈速度,可在压盘上分布多个传感器:
┌─────────────────────────────────────────────────────────────┐ 多传感器配置 │ (俯视图) │ │ │ │ ┌─────────────┐ │ │ │ 晶圆 │ │ │ │ │ │ │ │ ┌──●──────┼─────────────┼───────●──┐ │ │ │ S1 │ │ S2 │ ← 压盘 │ │ │ │ │ │ │ │ │ ●────┼─────────────┼────● │ │ │ │ S3 │ │ S4 │ │ │ │ │ │ │ │ │ └─────────┼─────────────┼──────────┘ │ │ │ │ │ │ └─────────────┘ │ │ │ │ S1 至 S4:SURAGUS 涡流传感器 │ └─────────────────────────────────────────────────────────────┘
福利
- 更快地覆盖晶片区
- 独立监控中心区域和边缘区域
- 增强多区云台的均匀性反馈
- 连续运行冗余
数据整合
SURAGUS 传感器通过多个接口与 CMP 设备控制系统集成:
实时控制界面
- 用于直接反馈的模拟输出(0 至 10 V,4 至 20 mA
- 数字协议(RS485、以太网 IP、PROFINET)
- 用于协调测量的触发和同步输入
数据记录和分析
- 厚度与时间的连续记录
- 区域平均均匀度计算
- 去除率趋势和 SPC
- 配方关联和优化
设备通讯
┌─────────────────────────────────────────────────────────────┐ 数据流结构 │ │ │ │ ┌─────────────┐ ┌─────────────┐ ┌─────────────┐ │ │ │ SURAGUS │ │ 设备 │ │ 工厂 │ │ │ │ 传感器 │─────│ 控制器 │─────
应用实例
铜质批量 CMP 端点检测
挑战
在铜双层大马士革加工中,除铜步骤必须精确地停在阻挡层上。
除铜不充分会留下铜短路;除铜过度会导致阻挡层变薄、分层和侵蚀。
未经适当测量的影响
- 抛光不足:铜残留物导致线路间短路(产量杀手)
- 过度抛光:宽阔地形中的凹陷会增加阻力;密集区域中的侵蚀会导致阻力变化
SURAGUS 解决方案
涡流传感器可在抛光过程中实时监测铜的厚度:
铜厚度与抛光时间 厚度 (nm) │ 1000├────────────╲ │ ╲ 800├ ╲ │ ╲ 600├ ╲ │ ╲ 400├ ╲ │ ╲ 200├ ╲ │ ╲_____ 端点触发器 0 ├───────────────────────────────────────
传感器检测到屏障层的接近,并触发端点,从而启用:
- 在目标剩余厚度处精确停机
- 入料厚度变化补偿
- 适应清除率漂移
结果
- 终点精度:正负 5 nm 余铜
- 减少打磨:与基于时间的工艺相比,减少 30% 至 50
- 晶片与晶片之间的一致性:小于 2% (1σ)
多区均匀性控制
挑战
如果不进行补偿,这种不均匀性会直接转移到 CMP 后的厚度变化上。
未经适当测量的影响
- 整个晶片上的剩余铜不均匀
- 影响电路时序的可变互连电阻
- 边模产量损失
SURAGUS 解决方案
多个涡流传感器为多区载物头提供特定区域的厚度反馈:
┌─────────────────────────────────────────────────────────────┐ 多区均匀性控制 │ │ │ 传入轮廓调整压力 │ │ │ │ ┌───────┐ ┌───────┐ │ │ / \ │ │ │ │ / \ ───
结果
- 提高晶片内的均匀性:40% 至 60
- 边缘产量恢复:好模具增加 1%至 2
- 减少对进口胶片规格的依赖
屏障金属端点检测
挑战
阻挡层很薄(10 至 30 纳米),因此很难进行端点检测。
未经适当测量的影响
- 屏障残留物导致耐药性问题
- 过度抛光会损坏低 k 电介质
- 依赖于模式的清除造成了统一性问题
SURAGUS 解决方案
高灵敏度涡流测量可检测阻挡层过渡:
障碍物抛光时的信号响应 信号 (mV) │ 50├────╲ │ ╲ 40├ ■ ■ 清铜 │ ╲ 30├ ───────────── 阻隔层 │ ╲ 20├ ■ ■ 障碍清除 │ ╲ 10├ ───── 终端 │ 0├───────────────────────────────────────
阻挡层金属的独特信号轮廓使其成为可能:
- 检测铜到阻挡层的转变
- 监测障碍物清除进度
- 障碍清除终点
结果
- 障碍清除终点精度:正负 2 纳米
- 介质损耗降低:20% 至 30
- 通过改进阻力均匀性15
钨 CMP 工艺控制
挑战
钨和氧化物的去除率非常不同,过度抛光非常有害。
未经适当测量的影响
- 钨盘面增加了接触电阻
- 氧化物侵蚀影响后续层地形
- 触点间电阻变化
SURAGUS 解决方案
涡流监测可在整个过程中直接测量钨的厚度:
- 实时计算去除率
- 目标剩余厚度的终点检测
- 基于实际清除行为的工艺优化
结果
- 钨盘减少:25% 至 40
- 接触电阻均匀性:小于 5% (1σ)
- 优化工艺时间:吞吐量提高 10-15
先进封装 CMP
挑战
扇出晶圆级封装 (FOWLP) 和混合键合需要具有亚纳米级形貌的超平表面。
铜再分布层 (RDL) 必须抛光到精确的厚度,并尽量减少凹陷。
未经适当测量的影响
- 表面形貌影响粘接质量
- 厚度变化影响阻抗匹配
- 钻孔会在粘接界面中产生空隙
SURAGUS 解决方案
可进行高分辨率涡流测量:
- 最终厚度控制在正负 10 纳米以内
- 实时均匀性监测
- 自适应抛光,实现模间一致性
结果
- 表面平面度:关键区域的 RMS 小于 1 nm
- 厚度精度:再分布层正负 10 纳米
- 减少债券无效:提高 50